les onduleurs autonomes
Introduction :
Les
onduleurs sont les convertisseurs statiques continu alternatif permettant de
fabriquer une source de tension alternative à partir d’une source de tension
continue.
Le
signal alternatif en sortie peut être sinusoïdal ou non de fréquence fixe ou
variable.
La
figure montre le schéma symbolique de l’onduleur.
Comme
on l’a vu au chapitre 2 (Les Redresseurs), un redresseur commandé tout
thyristors peut fonctionner en onduleur. Ce type d’onduleur est dit « non autonome » ou encore « assisté » car il
ne permet de fixer ni la fréquence ni la valeur efficace des tensions du réseau
alternatif dans lequel il débite. On se propose dans ce chapitre d’étudier les
onduleurs autonomes. Ces derniers fixent eux-mêmes la fréquence et la valeur
efficace de leur tension de sortie.
Les
onduleurs sont utilisés principalement dans deux types de systèmes :
—
Les ASI : alimentations sans
interruption, (UPS : uninterruptible supply system en anglais). Elles
servent le plus souvent d’alimentation de secours pour des systèmes informatiques.
La source de tension continue est généralement constituée d’une batterie
d’accumulateurs. La fréquence et l’amplitude de la tension de sortie sont fixes.
—
Les variateurs de vitesse pour
machines asynchrones. La source continue est obtenue par redressement du
réseau. La fréquence et l’amplitude de la tension de sortie sont variables.
A/GENERALITES :
Les
onduleurs autonomes se classent en deux groupes :
· Onduleurs
à fréquence fixe. Ceux-ci sont
utilisés comme alimentation de sécurité dans le centre hospitaliers, les
centrales téléphoniques, les ordinateurs, etc. Ces onduleurs sont alimentés à
partir d’une batterie d’accumulateurs.
· Onduleurs
à fréquence variable. Ceux-ci sont
alimentés en courant continu à partir du réseau alternatif par l’intermédiaire
d’un redresseur. Ils fournissent des tensions de fréquence et d’amplitude
variables utilisées pour contrôler la vitesse de moteurs à courant alternatif.
Les
onduleurs autonomes se classent aussi d’après la forme d’onde de leur tension
de sortie :
· Onduleurs
à onde rectangulaire : L’onde
de sortie est rectangulaire. L’amplitude de l’onde de sortie dépend de la
valeur de la tension d’entrée.
· Onduleurs
en créneaux de largeur variable :
L’onde de sortie est constituée par des créneaux rectangulaires alternatifs et
séparés par une zone morte à tension nulle. La tension de sortie varie si on
agit sur la durée des créneaux.
· Onduleurs
à modulation d’impulsion (PWM) : L’onde de sortie est formée de trains
d’impulsions positifs et négatifs, de largeur et d’espacement variable. La résultante de la forme de sortie se
rapproche d’une sinusoïde.
B/ONDULEUR MONOPHASÉ NON
ISOLÉ EN DEMI PONT :
1/ Débit sur charge
résistive :
Les deux condensateurs constituent un diviseur de
tension. Si leurs capacités sont assez élevées, la tension aux bornes de chacun
serait constante et égale à E/2.
La charge est constituée d’une résistance pure.
Lorsque le transistor T1 est conducteur, la charge
voit une tension Vch=E/2.
Lorsque le transistor T2 est conducteur, la charge
voit une tension Vch=-E/2.
Si les transistors conduisent pendant les mêmes
intervalles de temps, la commande est dite symétrique.
La tension Vch est alors rectangulaire. Le courant
Ich possède la même forme.
2/ Débit sur charge
inductive (Charge RL) :
On met des diodes en parallèle avec les transistors.
Leur rôle est d’assurer la continuité de courant. En effet, une charge
inductive ne supporte pas l’interruption brusque de courant. Ainsi, après le
blocage de T1 le courant Ich continue à circuler à travers la diode D2 qui
conduit spontanément.
Lorsque le transistor T1 conduit, la charge voit une
tension Vch=E/2.
Le courant Ich croît exponentiellement selon une
constante de temps .
.
Lorsque le transistor T1 est bloqué, la diode D2 se
met à conduire pour assurer la continuité de courant. La charge voit alors une
tension Vch=-E/2. Le courant Ich
diminue alors. Au passage du courant par 0, on envoie un signal de commande
vers la base de T2. La diode D2 se bloque et le courant Ich continue à croître
dans le sens opposé.
Au blocage de T2, la diode D1 prend la relève et la
charge voit de nouveau une tension Vch=E/2. Au passage du courant par 0, on
fait conduire T1 et le cycle reprend.
La
stratégie de commande adoptée consiste à faire conduire le transistor dès que
c’est possible (Au passage du courant par 0). Cette commande est dite symétrique ou adjacente.
C/ONDULEUR MONOPHASÉ NON
ISOLÉ EN PONT :
Le montage comprend quatre thyristors qui peuvent
être remplacés par des transistors utilisés comme interrupteurs électroniques
ainsi que quatre diodes montées en parallèle inverse aux bornes des thyristors.
Les circuits d’amorçage ou de blocage des thyristors ne sont pas représentés
· Commande symétrique :
Dans le cas d’une commande symétrique, l’amorçage
des thyristors Th1 et Th4 a lieu en même temps, et il en est de même pour Th2
et Th3. La tension de sortie est rectangulaire, et sa valeur efficace est égale
à E.
Lorsque les thyristors Th1 et Th4 sont amorcés, la
charge voit Vch=E et le courant augmente exponentiellement (Charge RL). En
bloquant ces derniers (Circuit de commutation forcée), la continuité de
courant sera assurée par les diodes D2 et D3 et la charge voit Vch=-E.
Au passage du courant par 0, on amorce Th2 et Th3.
Le courant continue à circuler dans la charge en sens opposé. En bloquant ces
derniers, les diodes D1 et D4 conduisent et Vch=E. Lorsque le courant passe par
0, on réamorce Th1 et Th4.
La tension de sortie est rectangulaire ; sa valeur
efficace est égale à E.
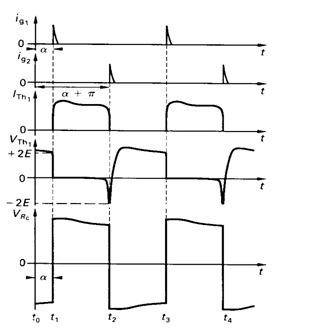
· Commande décalée :
La stratégie de commande est
différente ; le but étant de pouvoir obtenir aux bornes de la charge des
paliers à tension nulle.
Ainsi les thyristors ne sont
pas commandés au blocage en même temps.
Lorsque les thyristors Th1
et Th4 conduisent, la charge est soumise à la tension Vch=E ; le courant
croît exponentiellement. Lorsqu’on décide de bloquer le thyristor Th4, la diode
D3 prend la relève pour assurer la continuité de courant. La charge est en roue libre et Vch=0. Lorsqu’on bloque
le thyristor Th1 (décalé par rapport à Th4), la diode D2 conduit spontanément
et la charge voit une tension Vch=-E.
A l’extinction du courant,
on amorce les thyristors Th2 et Th3. Le courant progresse en sens opposé. Dès
que le thyristor Th3 se bloque (par commutation forcée), la diode D2 se met à
conduire et la charge se trouve de nouveau en roue libre.
Il est à noter que la
vitesse de progression du courant en phase de roue libre est plus faible qu’en
régime forcé (+E ou –E).
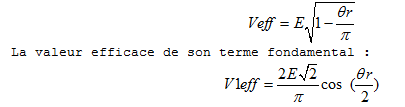
· Valeur efficace obtenue en
sortie :
La valeur efficace en sortie dépend de la tension
d’entrée E et de l’angle de la roue libre :
D/ONDULEUR MONOPHASÉ ISOLÉ :
Cet onduleur comprend deux thyristors, un
transformateur à point milieu, un condensateur de commutation C et une
inductance série L. Les deux thyristors,
Th1 et Th2, sont à l’état passant à tour de rôle, ce qui produit des impulsions
de courant de sens inverse, I1 et I2, dans les deux moitiés du primaire du
transformateur. On obtient, au secondaire du transformateur, une tension
alternative de forme rectangulaire. Le
condensateur de commutation C empêche les deux thyristors de laisser passer le
courant en même temps, de sorte qu’il provoque le blocage d’un thyristor
lorsque l’autre s’amorce.
L’inductance de lissage L tend à garder un courant constant dans
le circuit. Il en résulte que les courants I1 et I2 sont égaux et de forme
rectangulaire. Pour faire varier la
fréquence de l’onduleur, il suffit de changer la fréquence des signaux
appliqués sur les gachettes. On peut obtenir une fréquence comprise entre
quelques hertz et 5 Khz, selon les caractéristiques du transformateur et des
thyristors.
· Formes d’ondes :
E/ONDULEUR TRIPHASÉ EN PONT:
Cet onduleur contient six thyristors (deux
thyristors par bras) associées à six diodes en anti-dérivation. La charge est
résistive.
Pour des puissances plus petites, les thyristors
peuvent être remplacés par des transistors qui ne nécessitent pas de circuits
d’extinction (commutation forcée).
Trois thyristors sont en conduction à chaque
instant. Deux thyristors d’un même bras (Th1 et Th2 par exemple) sont amorcés à
180° de décalage. Les thyristors du bras voisin sont amorcés à 120° de
décalage.
Cette stratégie de commande s’appelle commande 180°.
·
Formes
d’onde :
La tension obtenue n’est pas
sinusoïdale. Il convient d’employer un filtre pour extraire son fondamental
ayant la même fréquence.
L’opération de filtrage
n’est pas assez aisée pour ce type de structure : les harmoniques ne sont
pas assez repoussés du terme fondamental. Ceci oblige à utiliser des filtres à
ordre élevé ce qui n’est pas facile à mettre en œuvre. C’est pourquoi on a
recours à une autre technique qui est la modulation de largeur d’impulsion MLI.
F/ONDULEUR A MODULATION DE
LARGEUR D’IMPULSION MLI:
1/Problème du
filtrage :
La tension en sortie du
convertisseur continu/alternatif n’est pas sinusoïdale. En effet, les
semi-conducteurs travaillant en commutation, la tension de sortie sera toujours
constituée de « morceaux » de tension
continue. Cette tension non sinusoïdale peut être considérée comme la somme
d’un fondamental (que l’on souhaite) et de tensions de fréquences multiples de
celle du fondamental, les harmoniques (que l’on ne souhaite pas). Ces tensions
harmoniques provoquent la circulation de
courants harmoniques.
L’objectif du filtrage
dépend du système considéré :
· Dans le
cas des ASI, on souhaite une tension analogue à celle délivrée par le réseau donc
sinusoïdale. On va donc filtrer la tension avec des condensateurs. L’impédance
en alternatif d’un condensateur étant Zc
= 1/Cw, on voit que pour les harmoniques de tension de rang croissants,
cette impédance est de plus en plus faible.
· Dans le
cas des variateurs de vitesse pour MAS, on souhaite que le courant soit
sinusoïdal pour éviter les couples
harmoniques générateurs de pertes et de vibrations. On va donc lisser le courant avec des inductances.
L’impédance en alternatif d’une inductance étant Z L= Lw, on voit que pour les
harmoniques de courants de rang croissants, cette impédance est de plus en plus
grande.
Remarques :
Dans le cas des MAS, l’inductance propre du
stator suffit généralement à assurer un filtrage convenable.
2/Technique MLI :
La
modulation de largeur d’impulsion MLI , est une méthode qui consiste à
introduire des commutations supplémentaires à fréquence plus élevées que la
fréquence du fondamental, transformant la tension en une suite de créneaux
d’amplitude fixe et de largeur variables .
Elle
repousse vers les fréquences les plus élevées les harmoniques de la tension de
sortie, ce qui facilite le filtrage.
Elle
permet de faire varier la valeur du fondamental de la tension de sortie comme elle permet de se rapprocher du signal
sinusoïdal désiré.
Les
spectres de fréquences suivants montrent l’effet de la technique MLI sur la
distribution des harmoniques :
Spectre
de fréquence aux bornes d’une charge RL alimentée par un onduleur monophasée
en demi pont non isolé.
|
Spectre de fréquence dans
le cas d’une commande MLI : disparition des harmoniques 3 et 5.
La commande MLI est
réalisée par comparaison d’une onde modulante basse fréquence à une onde
porteuse haute fréquence de forme triangulaire.
La commande à MLI présente
une neutralisation efficace des harmoniques permettant ainsi de se rapprocher
du signal sinusoïdal désiré.
G/APPLICATION :
ALIMENTATION DE SECOURS.
Les onduleurs autonomes à fréquence fixe sont surtout utilisés
dans les alimentations de sécurité qui se subtituent automatiquement au réseau
alternatif en cas de panne de courant. Ces alimentations de secours sont
appellées UPS (Uninterruptible Power Supplies). La figure donne le schéma
de principe d’un UPS.
Le système comprend :
· Un redresseur chargeur régulé qui charge la batterie
d’accumulateurs, tout en fournissant le courant nécessaire à l’onduleur.
· Une batterie d’accumulateurs qui assure le
fonctionnement autonome de l’onduleur lorsque le réseau alternatif est
interrompu.
· Un onduleur autonome qui fournit une tension de
sortie alternative sinusoïdale régulée à
la fréquence de 50 Hz avec un taux
d’harmoniques qui est inférieur à 5%.
· Des commutateurs électromécaniques qui permettent de
relier le réseau ou l’onduleur à la
charge.
· Un générateur diesel (groupe électrogène) qui démarre
après un court délai lors de la panne de courant et qui s’arrête lorsque le
courant est rétabli.
Les alimentations de
secours sont surtout utilisées pour alimenter des équipements qui requièrent un
fonctionnement permanent. Les applications les plus courantes sont :
· l’alimentation d’ordinateurs ;
· les systèmes de guidage d’avion (radio,
radar). ;
· le fonctionnement des blocs opératoires dans les
hôpitaux ;
· l’éclairage de sécurité de salle de
conférence ;
· les circuits d’alarme contre les incendies.
Les onduleurs à fréquence
variable sont surtout utilisés dans :
· La commande de vitesse des moteurs alternatifs
généralement asynchrones.
· l’alimentation des générateurs à ultra son et de fours à induction.
Mot-clé:
- les onduleurs autonomes cours
- les onduleurs autonomes PDF
- onduleur électrique
- onduleur de tension
- transformateur de courant
- onduleurs triphasés
- onduleur sinusoïdal
- onduleur monophasé
- test onduleur
- source d'énergie électrique
- schéma électronique onduleur
- schéma électrique d'un onduleur